
A maioria dos robôs é boa o suficiente para ver, mas para tocar? Esse foi um problema muito mais difícil. Embora os humanos saibam inatamente o quão difícil é empurrar uma caneta de café ou uma bola, os robôs têm sido tradicionalmente equipados com sensores minúsculos e complexos para avaliar a mesma coisa. Agora, pesquisadores da Universidade Queen Mary de Londres acreditam ter encontrado uma solução muito mais simples: tornar o toque visível.
Transforma o sensor de toque em cor
Conforme publicado pelo estudo Revista de CiênciasSeu novo sensor de toque muda de cor sempre que é aplicada pressão, permitindo que o fotógrafo padrão “veja” exatamente como o objeto está sendo tocado em tempo real.
Em vez de inserir milhares de sensores eletrônicos de pressão em um dedo robótico, o novo sistema incorpora o sensor diretamente no próprio material. Quando uma superfície macia é pressionada, produz padrões de cores vivas que mostram imediatamente onde a pressão é aplicada, quanta força é aplicada e como o material é deformado.
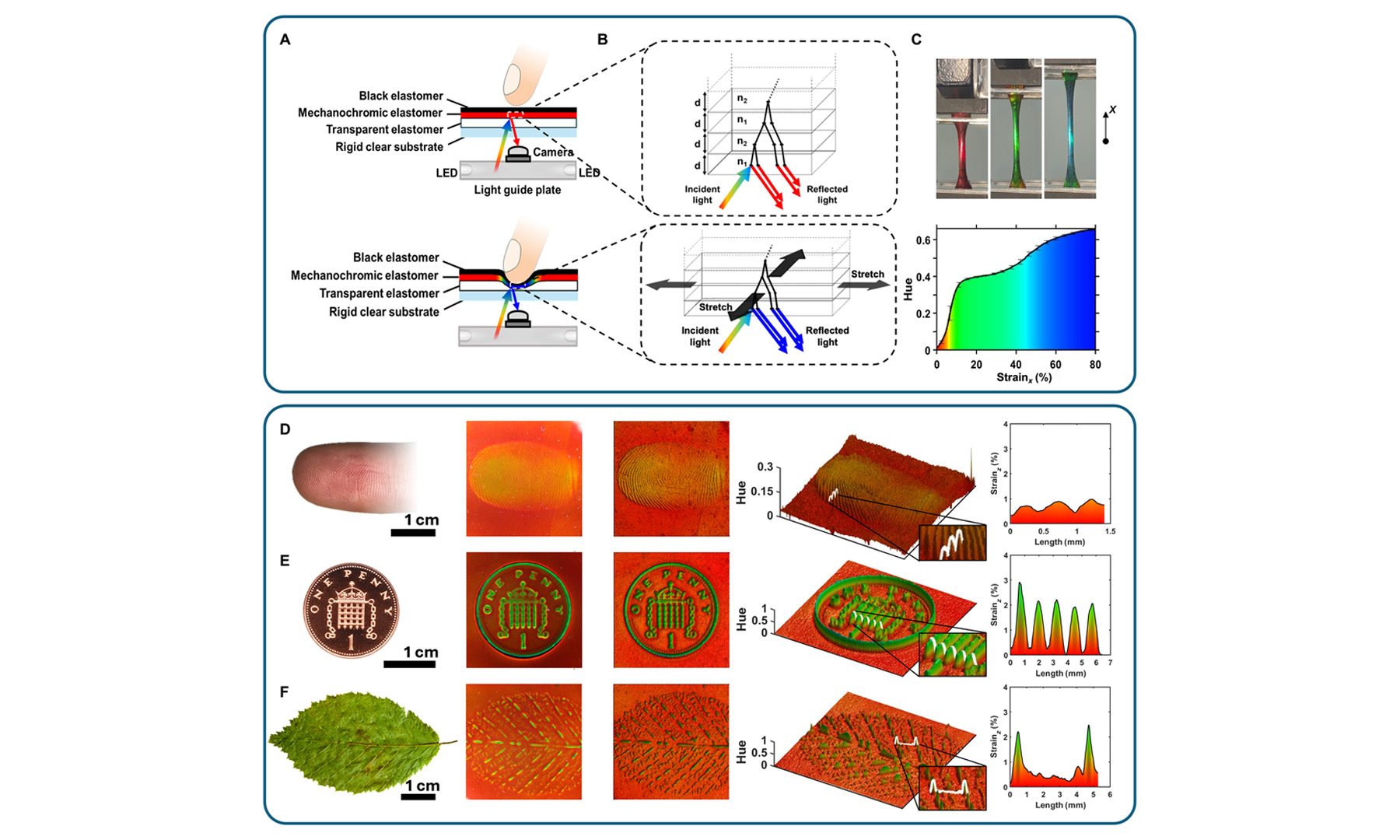
O truque é que essas cores podem ser capturadas usando uma câmera USB comum a um custo menor. Isso significa que os robôs não precisam mais de software computacionalmente intensivo para reconstruir os dados de toque de um sensor. Eles podem simplesmente “olhar” os padrões coloridos e entender imediatamente o que sentem. Segundo os pesquisadores, ele produz mapas de pressão de alta resolução, ao mesmo tempo que simplifica drasticamente o hardware geral.
Por que essas coisas vão além do laboratório?
Vai muito além do impacto, dando aos robôs uma melhor sensação de tato. Os pesquisadores acreditam que a tecnologia poderia ajudar as fábricas a montar pequenos componentes com mais precisão, para que os membros protéticos pareçam mais naturais, e até mesmo ajudar os robôs cirúrgicos a distinguir tecidos saudáveis de tecidos anormais durante procedimentos delicados.

Mais importante ainda, o novo sensor poderá resolver uma das maiores dores de cabeça da robótica. Os sistemas de toque tradicionais muitas vezes forçam os engenheiros a escolher entre velocidade e engenhosidade. Ao converter a pressão diretamente em padrões de cores visíveis que uma simples câmera pode ler, a nova abordagem oferece ambos: permitindo que os robôs “vejam” o toque em tempo real, em vez de depender de cálculos complexos.



{kind=link}